The verification of fittings in a scaffolding is a very onerous operation due to the number of connections. The stresses involved in the verification must also refer to the local reference system of the retained rod. In this article, we will see the most common types of joints and how to deal with them and perform checking.
Without claiming to be exhaustive, the main types of joints in a scaffolding structure are:
a. Swivel joint, which connects two rods with any angle and with a hinge-type constraint;
b. Right-angle joint, which rigidly connects two orthogonal rods ;
c. Parallel joint, which connects two rods keeping them aligned;
d. Sleeve coupler, which connects coaxially aligned rods.
(a) 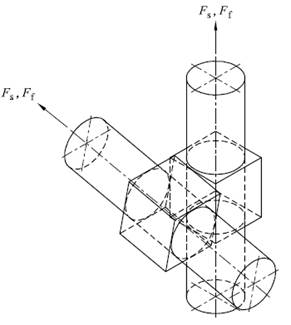 (b)
(b) 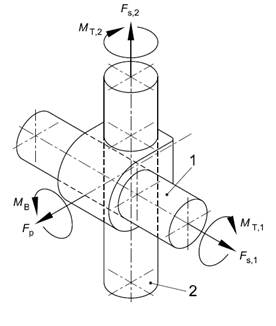
(c) 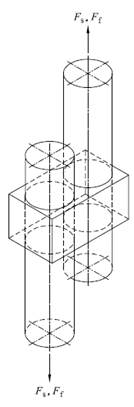 (d)
(d) 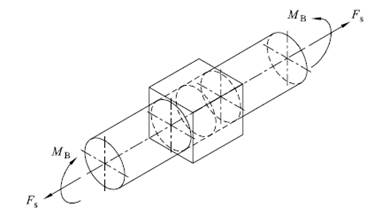
Diagram and nomenclature of the forces acting on the swivel (a) , right-angle (b), parallel (c) and sleeve (d) coupler – from EN 74 -1 and EN 12811-1
The UNI EN 74-1 standard describes the requirements and test
procedures for the joints,
also
listing
their classes. We will consider class B (highest resistances).
The verification is described in §10.3.3.5 of EN
12811-1 "Temporary works equipment - Part 1: Scaffolds - Performance
requirements and general design", with particular reference to right-angle
and sleeve couplers.
The report reported for orthogonal
joints can be easily extended to all other types . According to §10.3.3.5, formula (10), the relationship
between demand and capacity of the joint is:
![]()
With ![]() joint resistance of the joint
joint resistance of the joint
![]() resistance to
joint separation
resistance to
joint separation
![]() resistance to twisting / bending of the joint , with
resistance to twisting / bending of the joint , with ![]() .
.
This formula represents a conventional domain, which explicitly refers to 2-way flow, the separation of the joint and the resistance to torsion / cruciform moment of the joint. In particular, for the sliding reference is made to the average of the stresses Fs1 and Fs2 specific to each connected rod. This relationship applies only to orthogonal joints, since we assume the average of Fs1 and Fs2 . From a more general point of view, the same domain can be written as follows:
![]()
where
![]() is the
resultant of the sliding forces and
is the
resultant of the sliding forces and ![]() the
resulting conventional moment.
This relationship, which is of a general nature (think
for example of the one proposed by the same EN standard regarding sleeve
joints) conservatively includes all 3 mechanisms of collapse of the joint, i.e.
sliding, separation and bending failure, and will be applied to checks of all
joints.
the
resulting conventional moment.
This relationship, which is of a general nature (think
for example of the one proposed by the same EN standard regarding sleeve
joints) conservatively includes all 3 mechanisms of collapse of the joint, i.e.
sliding, separation and bending failure, and will be applied to checks of all
joints.
Design resistances must be found by the manufacturer based on the tests performed. As an indication, the EN standard contains the following values:
|
Table C.1 EN 12811-1 |
|
||
|
|
|
|
|
|
Type of joint |
Resistance [ kN or kNm ] |
||
|
|
|
Class A |
ClassB |
|
Orthogonal |
fSK |
10 |
15 |
|
Mbk |
|
0.8 |
|
|
Fpk |
20 |
30 |
|
|
Sleeve type |
fSK |
6 |
9 |
|
Mbk |
|
1.4 |
|
|
Swivel |
fSK |
10 |
15 |
|
Parallel |
fSK |
10 |
15 |
The modelling of the joint is another matter of
fundamental importance: the single joint can be modelled as
a "short" element (for example as long as the
offset between the axes of the connected pipes), or it can be considered as
"implicit" in the auction, i.e. incorporated at its ends.
The NextFEM Designer Struct module supports both modes,
and automatically imports
all modelled joints from PON
CAD
, both as an element and implicit.
In the following lines we will see how to treat them in verification.
Joint as an element
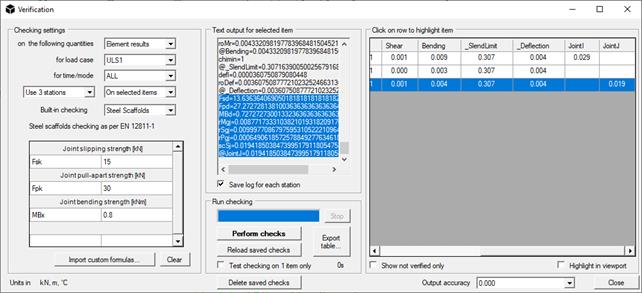
NextFEM Designer, with the Struct module, allows you to treat a single beam element as a "joint element". Setting this flag is performed automatically in case of import of PON CAD scaffolding, and can be enabled or disabled for each item from the Edit / Change element type / item element-> IsJoint.
(a) 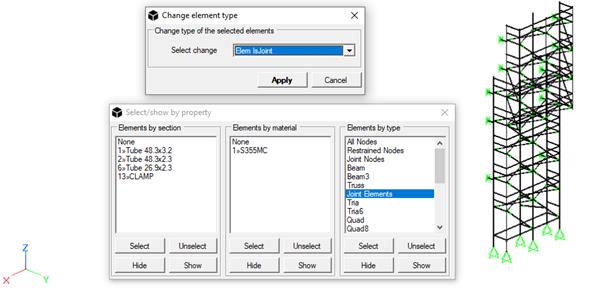
(b) 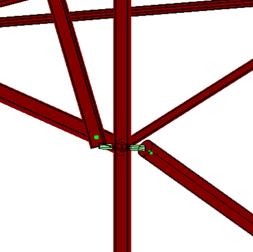
Selection and modification masks for the joint elements (a) and detail of the model in the diagonal-upright node
The joint is modelled as a single "squat" beam element, i.e. with a cross section of dimensions comparable to its length. In the following figure, the diagonal on the façade is connected to the upright through an element orthogonal to the development of the diagonal, which will then react to shear. The slenderness of this element is particularly important: the thicker it is, the more it will absorb shear stress, and consequently the axial load passing through the diagonal will increase, being the structure hyperstatic. A good approach is to use a cross-section with an area more or less equal to that of the connecting bolt, also taking into consideration the free span of this pin.
Modelling detail imported from PON CAD of element ( clamp ) connecting the riser to the diagonal of the facade
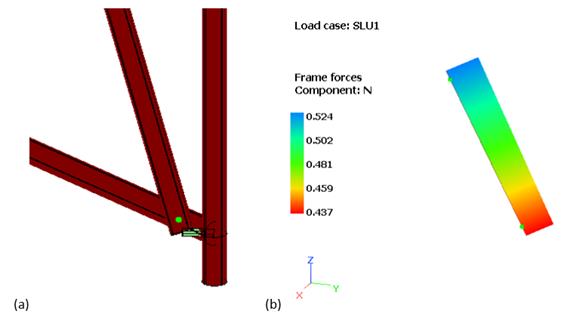
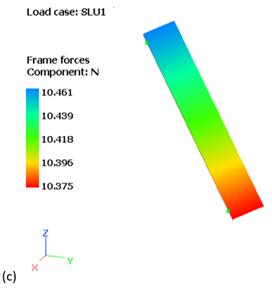
As a demonstration of this, the normal effort of the diagonal of figure (a) of the same scaffolding, connected with joint elements having a circular section full of diameter D = 5mm (b) or D = 50mm (c), as shown in the previous figure, with the same length of the joint element (once the diameter of the connected pipe, about 48mm). Notice how the axial effort that passes through the beam changes about 20 times.
Apart from modelling, please note in the following figure that the axial force in the diagonal is the result of the 2 shear forces that pass through the joint element that connects it to the upright. For the verification of the joint element, the forces referred to its local axes x, y and z are taken into account, oriented as depicted in the following figure (a).
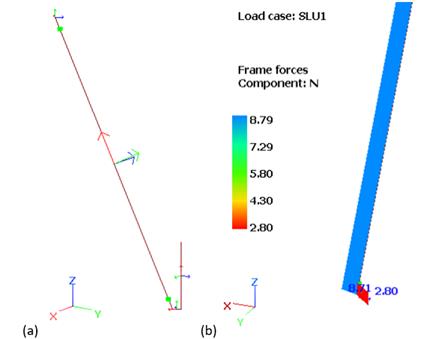
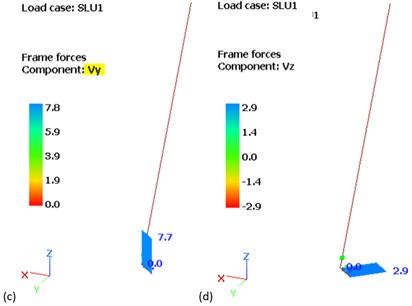
Local axes of joint and diagonal façade elements (a), axial stresses for the first load combinations SLU (b), Vy shear (c) and Vz shear (d)
The resultant of the sliding for the joint element is evaluated during the verification phase by the Struct module as:
![]()
while the separation force is equal to N if it is traction, otherwise 0.
Conservatively, the cruciform moment
it is calculated as the
maximum of the results at the ends ![]() to represent both the twist of clamps
and the cruciform moment for orthogonal joints . This formulation particularly in favor of safety is used since, in the case of sleeve joints, the resistance
considered must be associated with the moment of equilibrium and therefore the
factor 2 is not found in the denominator of the verification relationship. Likewise for the sliding, since for the sleeve joints the ratio
between the results of the pulls and once the sliding resistance is
particularly conservative.
to represent both the twist of clamps
and the cruciform moment for orthogonal joints . This formulation particularly in favor of safety is used since, in the case of sleeve joints, the resistance
considered must be associated with the moment of equilibrium and therefore the
factor 2 is not found in the denominator of the verification relationship. Likewise for the sliding, since for the sleeve joints the ratio
between the results of the pulls and once the sliding resistance is
particularly conservative.
The general formula presented above is then used to evaluate the ratio of demand / capacity of the joint.
In prefabricated multidirectional scaffolding, the verification is not always significant: in general, the resistance of the façade / diagonal connection is over-resistant with respect to the critical Eulerian load of the diagonal itself. The Struct module allows a complete personalization of the verification values to allow the designer complete control of these connections.
Coupler as end-joint of a beam
The most common case of joint modelling (and also the least expensive in terms of input time of the structural model) is certainly to consider the joints as "incorporated" in the ends of each rod. Consider, for example, a scaffolding made entirely with tubes & fittings.
(a)  (b)
(b) 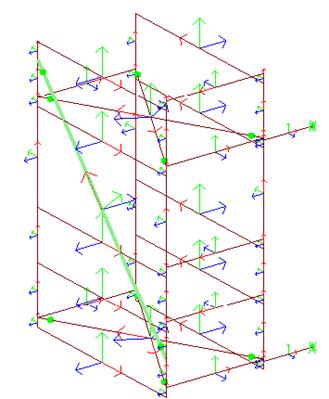
Axonometric view of the tubes & fittings scaffolding
(a) and local axes of a portion, in which the diagonal is highlighted in green (b)
The Struct module, having received the indication of the pipe-joint rods from PON CAD (in this case all, excluding the risers), assigns the "joint-node" flag to the end nodes of the same rods. In this way, it will be possible to identify them in the verification of the elements: in station 1 (extreme I) the joint will be checked at the first end, in station 5 (end J) the one at the opposite end.
This automatism simplifies and shortens the operations that the designer should lead otherwise for the verification of each joint. The verification is carried out as for the joint elements, taking care to obtain the actions acting differently, always according to the local axes of the connected element.
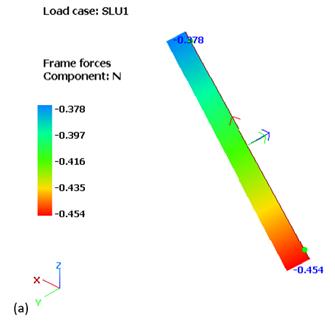
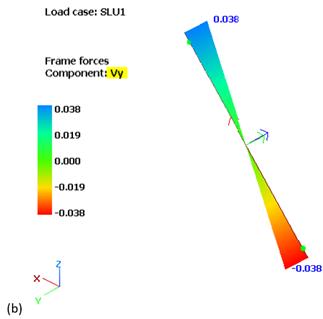
Axial stress (a) and Vy shear due to self-weight (b) for the SLU1 load combination for the diagonal under examination
The resultant of the sliding for each joint node is evaluated during the verification phase by the Struct module as:
![]()
while the separation force is equal to ![]() , with any sign
(the crushing of the joint is also conservatively counted).
, with any sign
(the crushing of the joint is also conservatively counted).
Conservatively, the
cruciform moment is calculated as
![]() to
represent both the bending of clamps and the cruciform moment for orthogonal
joints .
The general formula presented above is then used to
evaluate the ratio of demand / capacity of the joint.
to
represent both the bending of clamps and the cruciform moment for orthogonal
joints .
The general formula presented above is then used to
evaluate the ratio of demand / capacity of the joint.
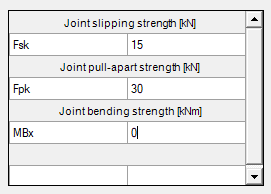
Finally, the Struct module allows to exclude from the
verification a mechanism (for example the flexural one for orthogonal Class A fittings)
by setting the relative resistance to zero (eg MB
x = 0) .
As we have seen, Struct deals with the verification of fittings in the same way, being already undifferentiated in the CAD environment. This saves the user the classification in groups, which is however possible manually with the aim, for example, of verifying with orthodontic parameters the orthogonal, revolving, parallel joints, etc.
NextFEM Designer makes it possible to create groups, so that they can be recalled during verification, with the command View / Select by groups ...
(a) 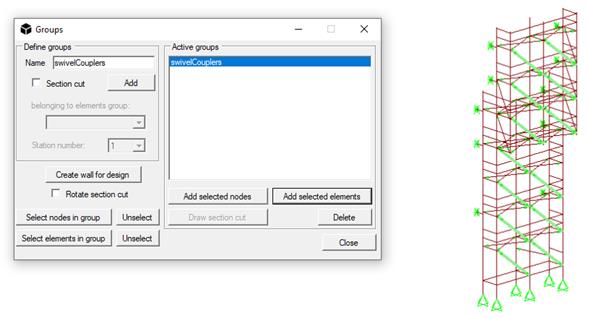
(b) 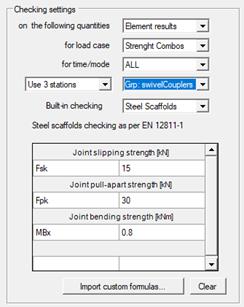
In the case of joint nodes, it will be sufficient to select the elements involved, while the joint-elements already represent the desired members. It will be enough to select the desired group during the verification phase, as in figure (b).
The strength of the Struct module
in dealing with joint checks makes this tool an
indispensable aid for the calculation and verification of temporary structures
such as scaffolding and stages.